针对当前在复杂任务和新任务下机器人与人类劳动者相比具有“学习慢、控制慢”等缺点以及机器人“不会用、不好用”的应用现状,通过建立可快速求解的机器人模型的泛化表达新模型,实现决策和控制效率的提升,提升机器人敏捷作业能力,实现类人敏捷的快速作业(身手敏捷),聚焦机器人控制算法,解决速度与精度的平衡技术问题,实现机器人高速、高精度的敏捷作业能力。
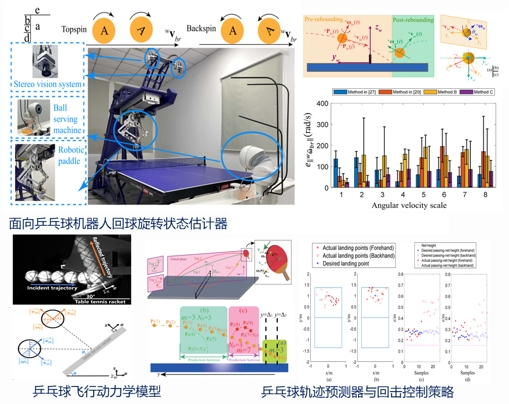
研究方向2-1:乒乓球竞技对打机器人快速决策技术
以乒乓球竞技对打机器人系统为研究对象,以对任意来球的成功回击为目标,建立乒乓球飞行状态空气动力学和球桌/球拍的动态参数反弹模型,建立了与中科新松合作开发的对打竞技乒乓球机器人的受限运动学模型,基于该过程模型构建快速乒乓球轨迹预测器、旋转状态估计器、以及机器人球拍运动状态预测器,并在此基础上建立适配的模型预测控制律,最终实现50 ms内完成乒乓球检测、速度和旋转估计、轨迹预测、击球策略优化与选择、机器人击球运动规划等一系列计算,构建出目前来球速度最快(10 m/s)、旋转最高(251.2 rad/s)的乒乓球竞技机器人系统,较好地显示机器人敏捷作业的能力。
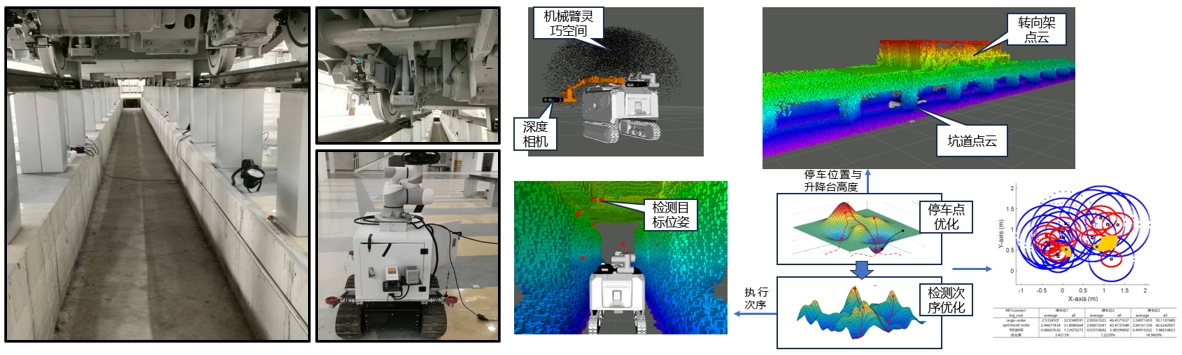
研究方向2-2:高铁巡检敏捷移动作业机器人技术
围绕当前高速铁路动车组一级检修存在检修能力趋于饱和、作业人员利用率低以及生产效率难以提升的问题,以与格灵深瞳联合研发的移动作业机器人为基础,搭建机械臂自主规划与导航控制系统,研发可快速、敏捷作业的列车车底/车侧巡检机器人,克服传统巡检机器人在检测精度和作业效率难以满足巡检时间窗口要求的固有缺陷,推动相关技术在智能交通场景的应用。
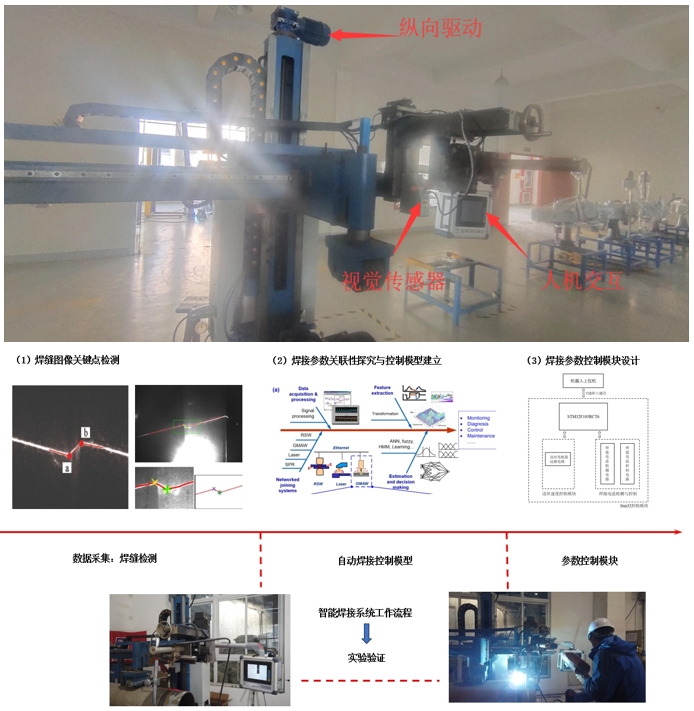
研究方向2-3:焊接机器人参数自适应调节与快速部署技术
针对焊接机器人系统通用性差及过程控制稳定性差的的问题,建立焊缝宽度与焊接电流之间、焊缝宽度与送丝速度之间的焊接参数模型,构建即插即用型焊接参数控制模块,实现对打底焊接速度、送丝速度、焊接电流、摆动幅度(频率)的自适应控制,构建自动化打底焊接系统,完成全自动自主打底焊接任务,推动相关技术在国家战略工程场景的应用。